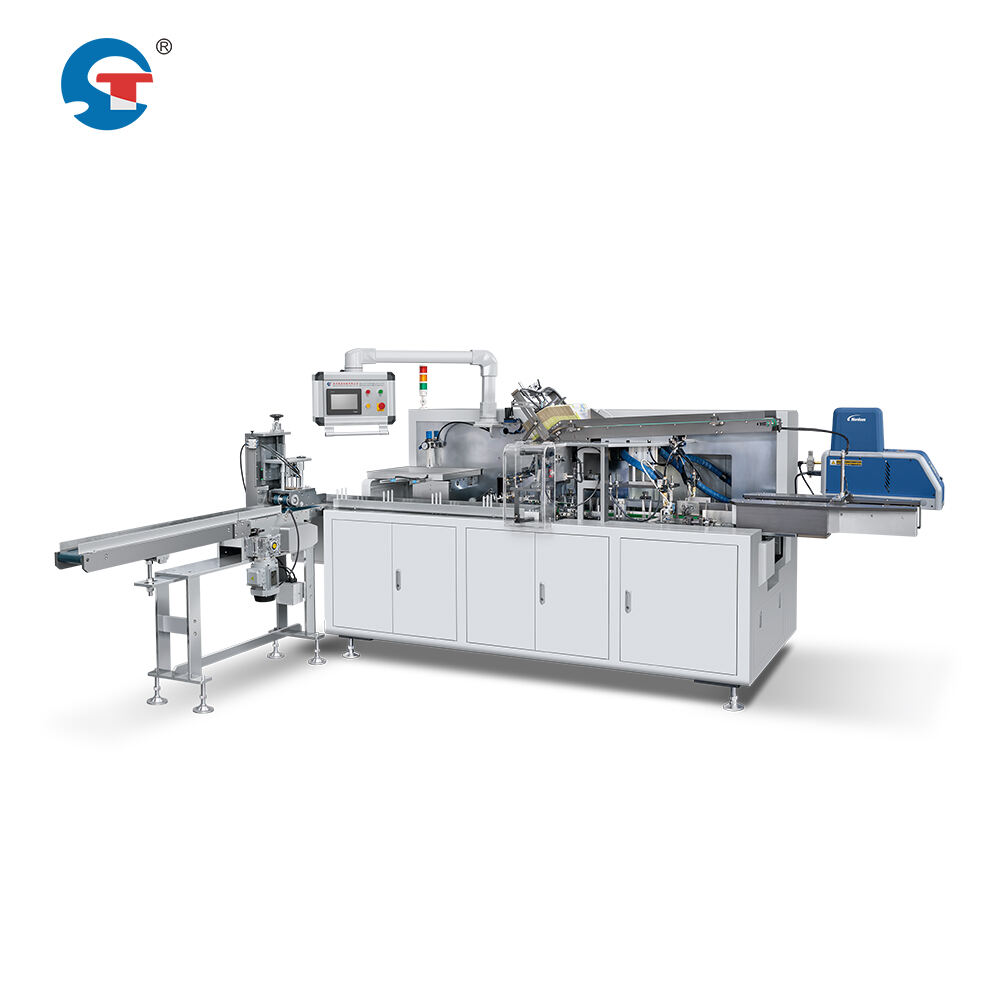

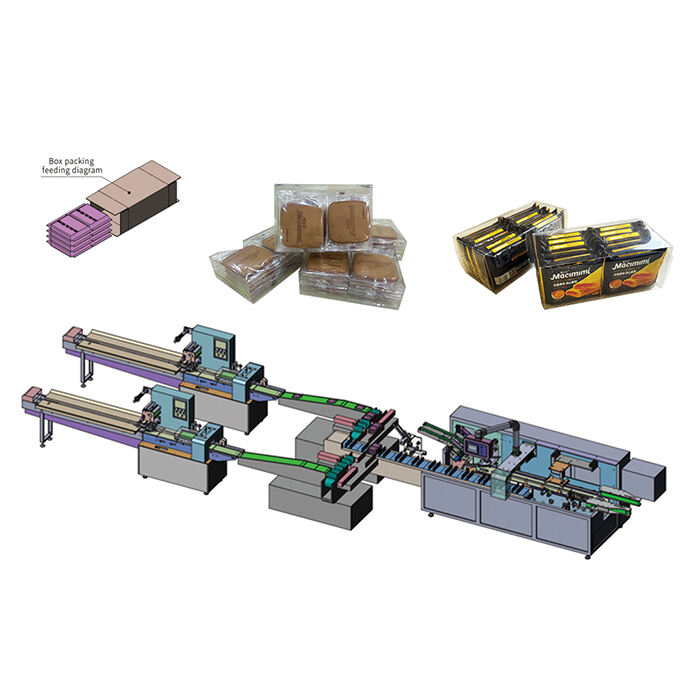
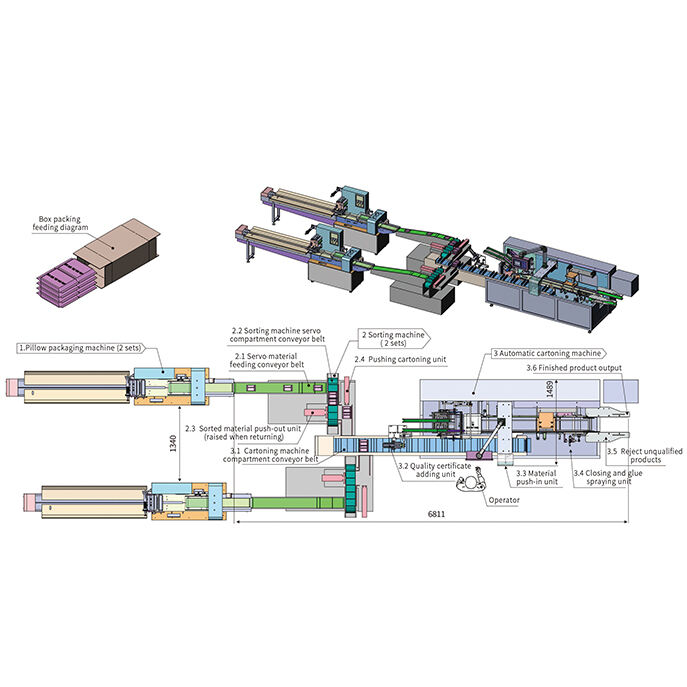
두 개의 필로우 팩커가 박스 포장기와 연결되어 있으며, 8개의 식품 가방이 자동으로 상자에 담깁니다:
1. 기계에 의해 베개 형태로 포장된 재료는 연결 피더의 서보 플라이 컨베이어 벨트에 차례로 진입하며, 서보 파티션 컨베이어 벨트는 각 파티션이 네 개의 재료 봉지를 수용할 때마다 한 파티션을 신속히 이동시켜 상하로 쌓인 네 개의 봉지를 포함하도록 합니다. 물류 처리 푸시 메커니즘은 팔리아웃 위치에 있는 두 파티션의 여덟 개 봉지를 함께 밀어 하나의 그룹으로 완성되며, 카트닝 메커니즘이 여섯 개의 재료 그룹을 카트닝 컨베이어 벨트 파티션으로 밀어 넣습니다.
2. 두 개의 베개 밸러는 카트닝 머신의 전면 및 후면 측면에서 먹이를 공급합니다: 먹이의 안정성을 보장하기 위해 먹이의 후단에서 대기 물질 기능이 있습니다.
3. 카트닝 머신의 흡입 신호 광섬유는 컨베이어 벨트 구획에 물질이 있는지(물질 없음 유휴 상태)를 감지하고 적절한 위치에 합격증을 추가합니다. 동시에 상자 흡입 명령이 출력됩니다. 밀어 넣기 메커니즘이 밀어 넣기 정거장에서 열린 카트너로 물질을 밀어 넣고, 작은 혀를 닫고 접착제를 분사하여 카트너를 봉인한 후 완제품이 출력됩니다. 불합격 제품은 제거됩니다.